
A high-school capstone built with two close friends: a fully autonomous, multi-game-mode pinball machine, designed and built from scratch with no manual to follow. The highs, lows, failures, and late nights are what made me fall in love with engineering.
The biggest lesson, clearer to me now than it was then: the simple design is usually the best, and the right team matters far more than what the team knows technically on day one.
A gearbox-and-flywheel launcher, ramped up to speed in code over a short window. Getting the gear ratio and ball spacing right took five iterations of motor sizing and gearing. (Audio left in — apologies for the language; it conveys the emotional rollercoaster.)
A single ball was too small for the distance sensor to read reliably, so I built a LEGO seesaw to increase the surface area. A ball rolling down blocks the sensor; the code decrements the ball count when the reading drops below 10 cm. Stray readings during play ranged 20–30 cm, so the tight 10 cm threshold gave clean, binary detection with no false counts.
Originally the flippers and game logic ran as separate code. The professor judged that too simple, so we re-architected everything as a Boolean state machine: a large set of booleans and if-statements representing game states, evaluated continuously inside a single while-loop. Inefficient by design, but it was the constraint we were given — and getting it working was a genuinely happy moment.
The weakest subsystem. Release timing depended on the box angle and was only a few encoder ticks wide between success and failure, and it shifted with the number of queued balls. We didn't have time to redesign it, so we tuned the timing to release as the launcher hit max speed. Alternative designs are discussed in the full report.
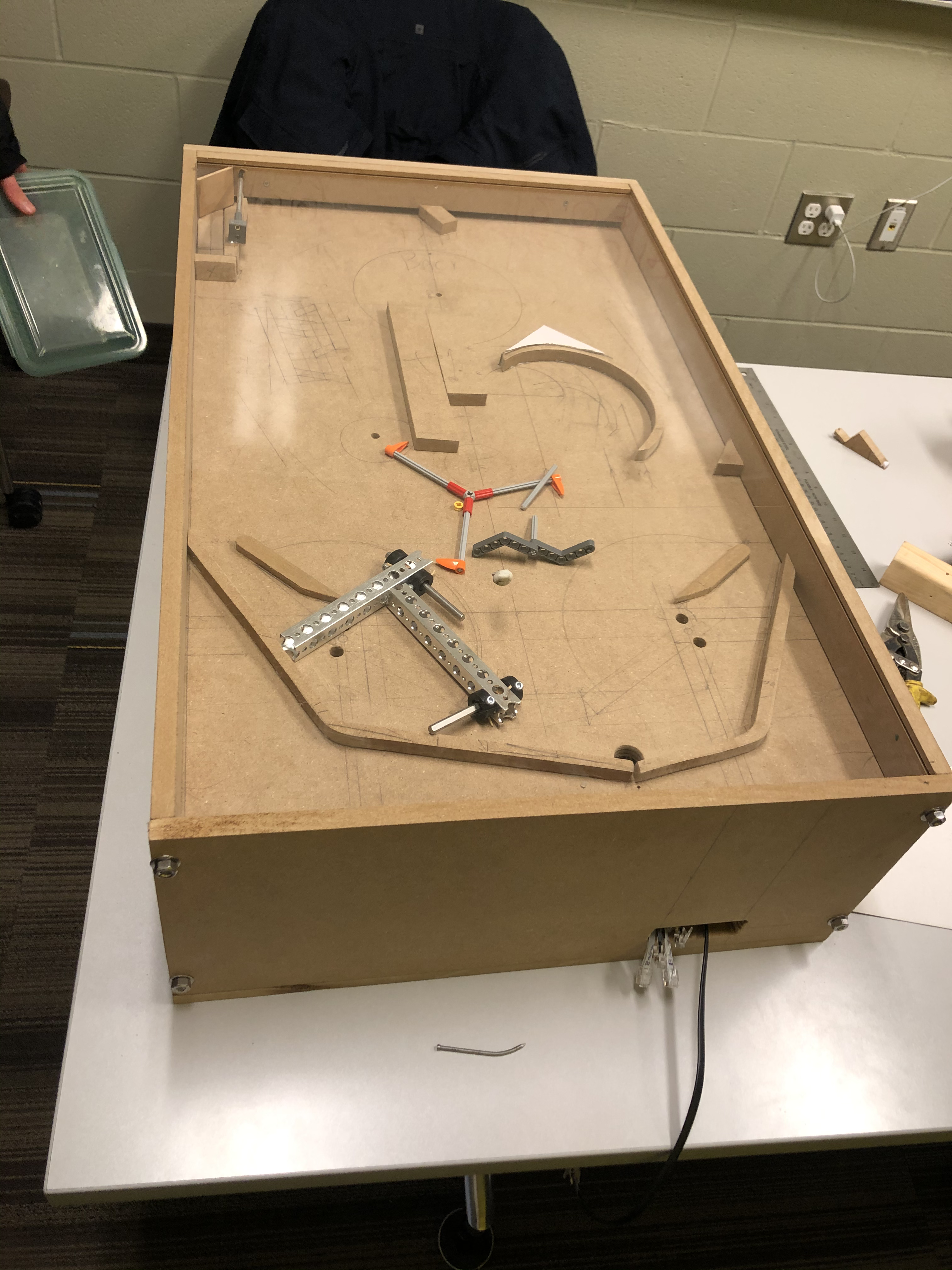
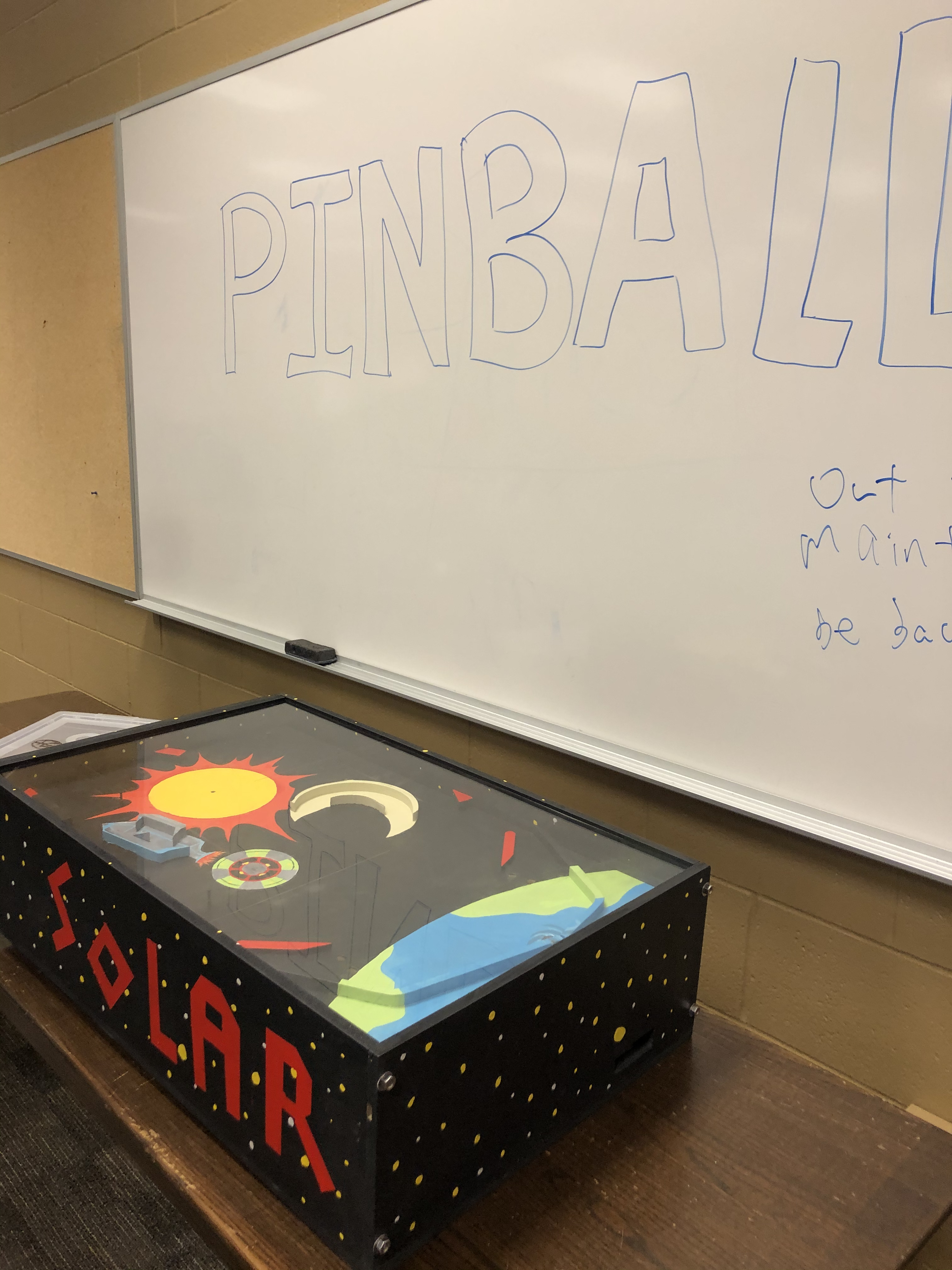
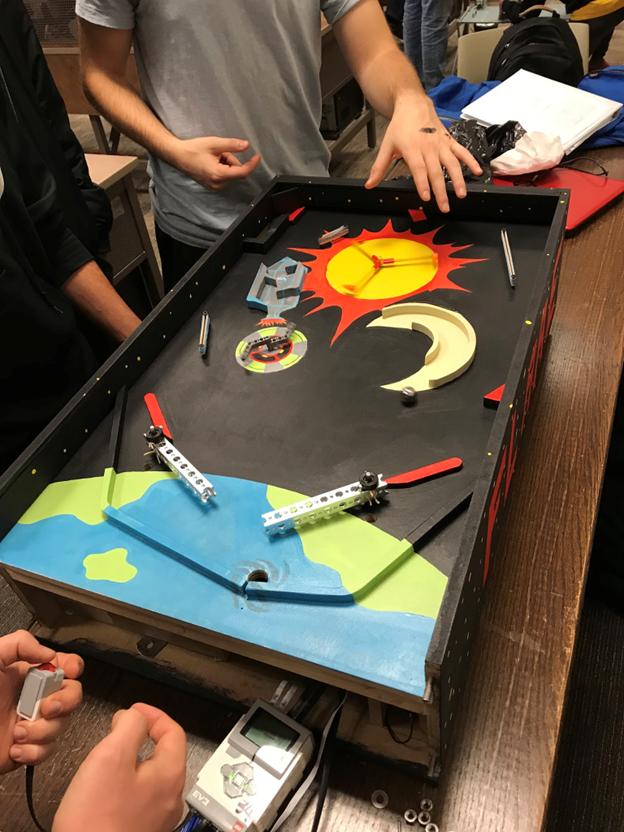
Progress shots through the build, from internals to paint.





Described by the professors, TAs, the Head of Mechatronics Engineering, and the Dean of Engineering as the most complete project they had seen.
A fully working, autonomous multi-mode pinball machine with a leaderboard — and the project that set the direction for everything since.
Download Full Report ↓